Հիմնական հատկանիշները:
1. Ընդհանուր ճշգրտությունը stepper շարժիչի քայլ Անկյուն 3-5%, եւ չեն կուտակվում:
2. Թույլատրել ամենաբարձր ջերմաստիճանը քայլային շարժիչի տեսքին:
Քայլային շարժիչի ջերմաստիճանը կկատարի մագնիսական նյութերի առաջին շարժիչի ապամագնիսացումը, ինչը կարող է հանգեցնել ոլորող մոմենտների նվազման և նույնիսկ աստիճանից դուրս, ուստի շարժիչի տեսքը թույլ է տալիս ամենաբարձր ջերմաստիճանը կախված լինի մագնիսական նյութի ապամագնիսացման տարբեր կետերից.Մագնիսական նյութերի ապամագնիսացումը, ընդհանուր առմամբ, ոմանք 130 աստիճանից բարձր են, ոմանք նույնիսկ 200 աստիճան Ցելսիուսից բարձր, ուստի 80-90 աստիճան Ցելսիուսի ջերմաստիճանում աստիճանական շարժիչի տեսքը լիովին նորմալ է:
3. The stepper շարժիչի ոլորող մոմենտ տարբերվում է աճի ռոտացիոն արագությունը կկրճատվի:
Շարժիչի պտույտը քայլելիս յուրաքանչյուր փուլային ոլորուն ինդուկտիվության շարժիչը կստեղծի հակադարձ էլեկտրաշարժիչ ուժ.Որքան բարձր է հաճախականությունը, այնքան մեծ է հետևի էմֆ:Դրա գործառույթի ներքո հաճախականությամբ (կամ արագությամբ) շարժիչը և փուլային հոսանքը նվազում են, ինչը հանգեցնում է ոլորող մոմենտների նվազմանը:
4. Կարող է ճիշտ աշխատել ցածր արագությամբ շարժիչը քայլելիս, բայց որոշակի արագությունից բարձր չի կարող գործարկվել, որն ուղեկցվում է ճռռոցով:
Stepper շարժիչն ունի տեխնիկական պարամետրեր. առանց բեռի մեկնարկի հաճախականությունը, քայլային շարժիչը առանց բեռի պայմաններում կարող է նորմալ բեռնման իմպուլսային հաճախականություն, եթե զարկերակային հաճախականությունը արժեքից բարձր է, շարժիչը ճիշտ չի սկսվում, կարող է կորել կամ արգելափակվել:Բեռի դեպքում մեկնարկի հաճախականությունը պետք է ավելի ցածր լինի:Եթե դուք ցանկանում եք այնպես անել, որ շարժիչը հասնի բարձր արագության պտույտի, զարկերակային հաճախականությունը պետք է լինի արագացնելու գործընթացը, մասնավորապես մեկնարկի հաճախականությունը ցածր է, իսկ հետո որոշակի բարձր հաճախականության դեպքում արագացումը ցանկալի է (շարժիչի արագությունը ցածր արագությունից բարձր արագություն )
Քայլային շարժիչն իր ուշագրավ բնութագրերով թվային արտադրության դարաշրջանում կարևոր նպատակ է խաղում:Թվային տեխնոլոգիայի և բուն քայլային շարժիչի զարգացմամբ, բարելավելով տեխնոլոգիան, քայլային շարժիչը կկիրառվի ավելի շատ ոլորտներում:
ապրանքի նկարագրությունը
| Քայլի անկյուն |
0.6/1.2 աստիճան |
| Մեկուսացման դիմադրություն |
500V DC 100MΩ Min |
| Դիէլեկտրիկ ուժ |
1000V AC 50Hz 2mA 1minute |
| Մթնոլորտային ջերմաստիճան |
-20 - 40 ° C |
| Ջերմաստիճանի բարձրացում |
80K Max |
| Մեկուսացման դաս |
Բ |
Հիմնական տեխնիկական պարամետրեր
| Մոդել |
Գործող լարումը |
Գնահատված ընթացիկ |
Դիմադրություն |
Ինդուկտիվություն |
Holding Torque |
Noload հաճախականություն |
Մեկնարկային հաճախականություն |
Քաշը |
Երկարություն |
| |
VDC |
Ա |
Ω |
mH |
Նմ |
Հց |
Հց |
կգ |
մմ |
| 130BYG350A |
80~325 թթ |
5 |
1.3 |
13.1 |
37 |
20000 թ |
2500 թ |
17.8 |
226 |
| 130BYG350B |
80~325 թթ |
5 |
1.7 |
17 |
50 |
18000 թ |
2500 թ |
22.5 |
282 |
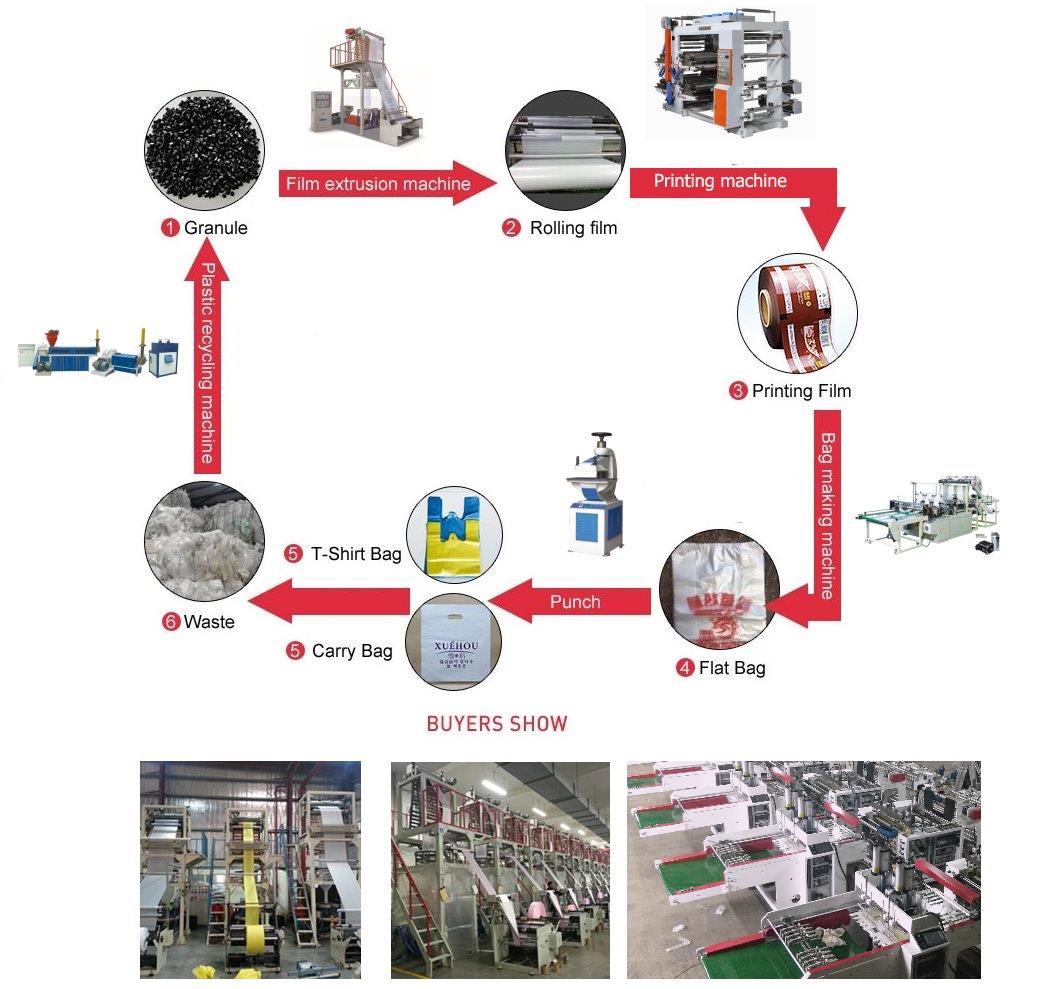
Լայնորեն օգտագործվում է փաթեթավորման մեքենայի, տպագրական մեքենայի, պլաստիկ տոպրակի մեքենայի, դեղագործության, լվացքի, ներարկման ձուլման մեքենայի, փայտամշակման և այլ մեքենաների և սարքավորումների մեջ:
ՈՒՇԱԴՐՈՒԹՅՈՒՆ. Շարժիչը տեղադրելիս պետք է համոզվեք, որ շարժիչի լիսեռը և բեռի լիսեռը համակենտրոն են, երբեք չհարվածեն դրան, որպեսզի չվնասեք շարժիչը: